
Indy Autonomous Challenge
Control systems for high-speed autonomous racing, optimizng performance and safety at speeds exceeding 150 mph

Fault-Tolerant Adaptive Flight Control
Robust learning-based adaptive fault-tolerant control method for over-actuated aircraft
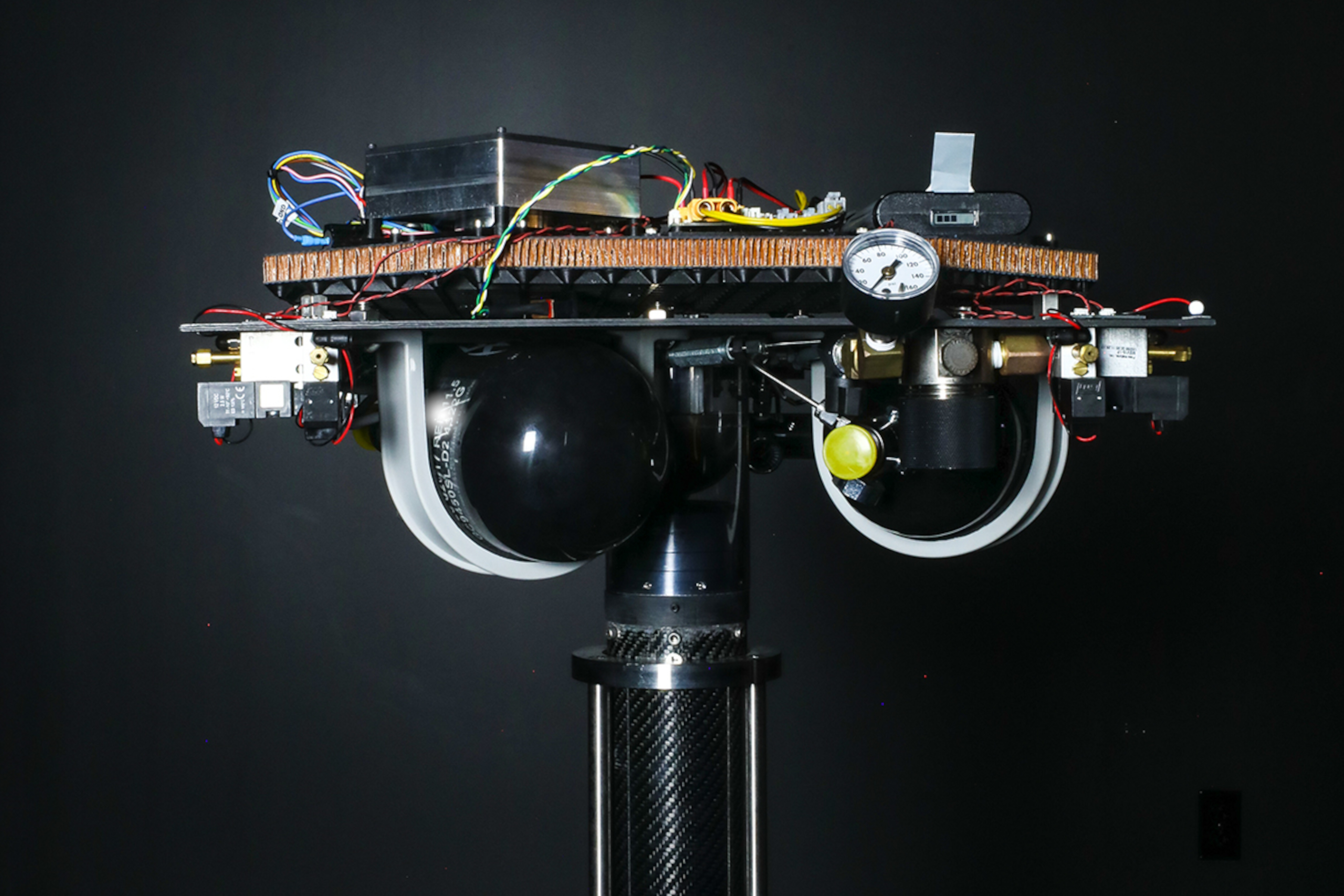
Spacecraft Simulator
Systems design and hardware-software interface setup for robotic spacecraft motion simulation platform
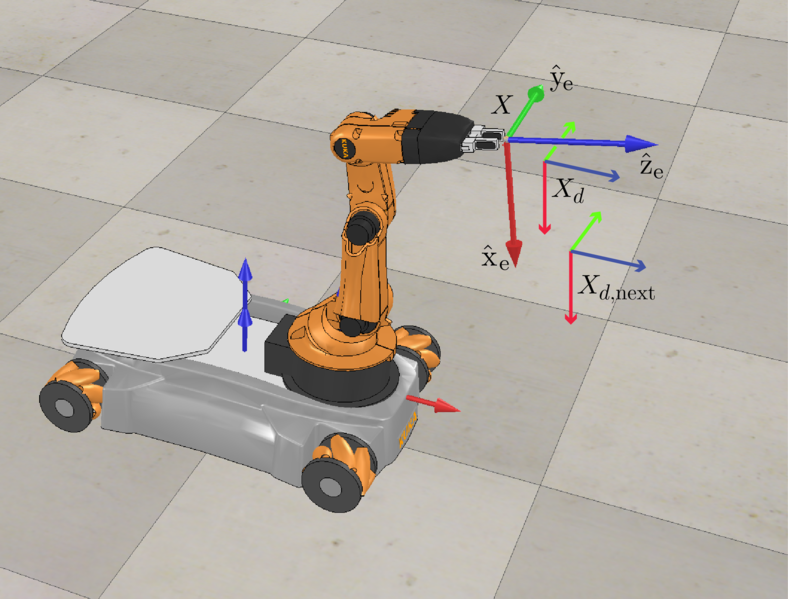
Mobile Manipulation
End-effector tranjectory generation, mobile robot manipulation, and feedback control, demonstrated in simulation
UAV Precision landing
UAV flight and precision using visual-inertial odometry (VIO) within ROS framework
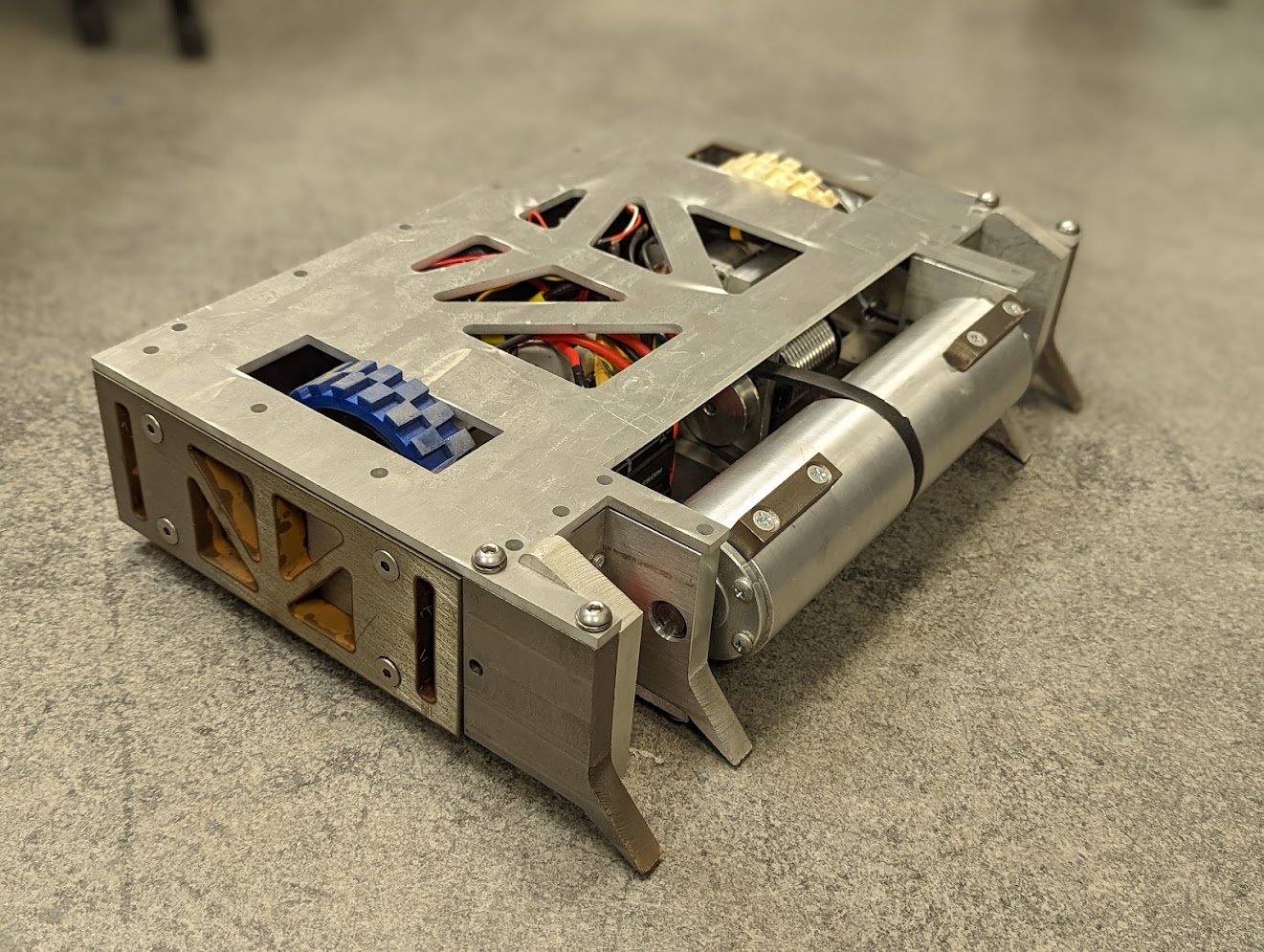
Robobrawl - Juan
A 30 lb combat robot with a vertically spinning drum - to compete in Robobrawl 2020

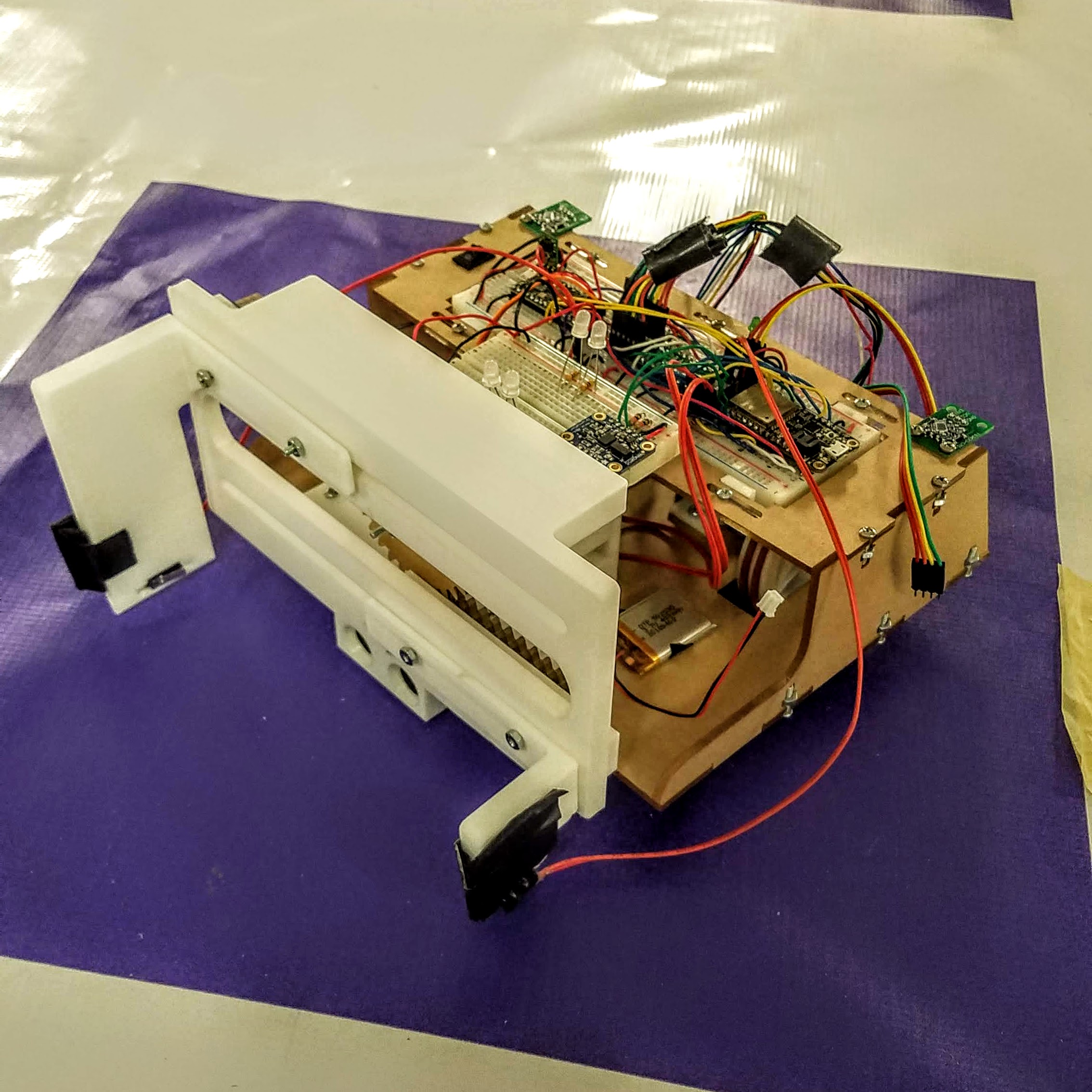
McCormick Robot Design Competition
A block-finding robot with various sensors and localization capabilities