Mobile Manipulation
Introduction
The goal of this project is to drive and manipulate the KUKA youBot in the simulation software CoppeliaSims. The project covers writing software to perform the following tasks:
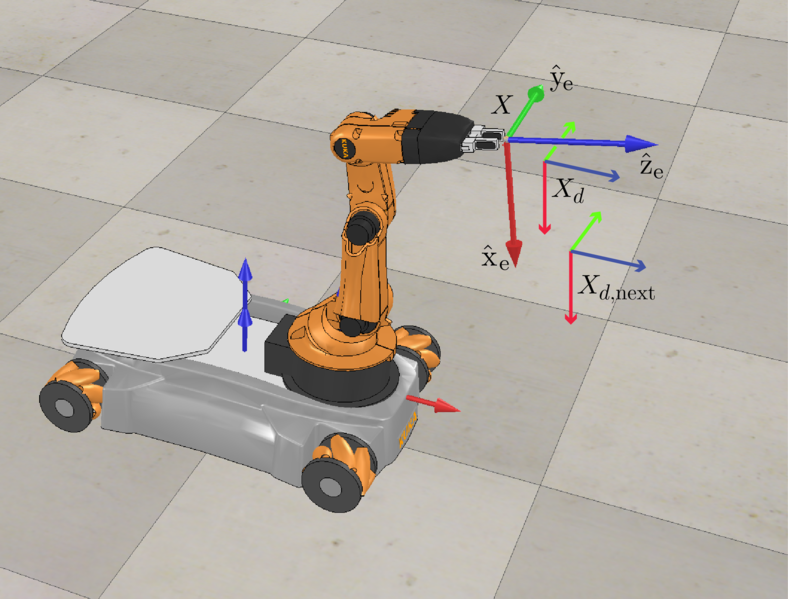
- Plan a trajectory for the end-effector of the youBot mobile manipulator (a mobile base with four mecanum wheels and a 5R robot arm)
- Perform odometry as the chassis moves
- Perform feedback/forward control to drive the youBot to pick up a block at a specified location, carry it to a desired location, and put it down
youBot Kinematics
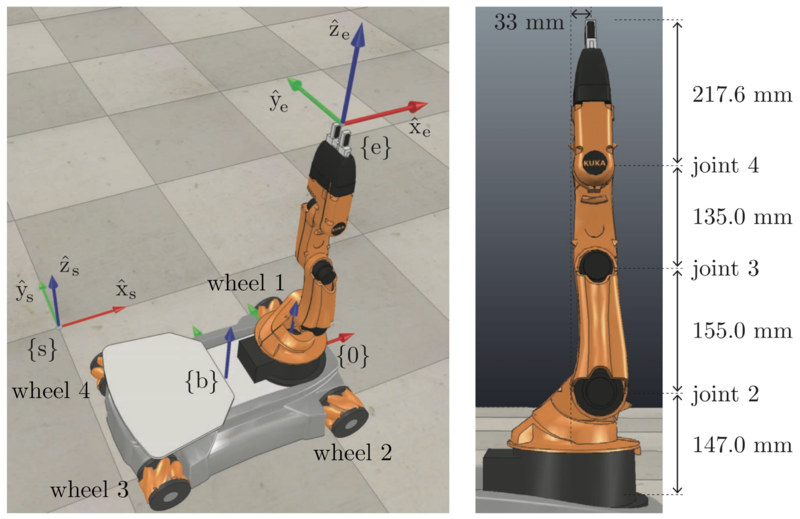
This figure illustrates the arm at its home configuration (all joint angles zero) and the frames {s}, {b}, {0}, and {e}. For the image on the right, joint axes 1 and 5 (not shown) point upward and joint axes 2, 3, and 4 are out of the screen.
Simulation
Initial cube configuration at (x, y, z) = (1, 0, 0.025 ) m. Default desired final configuration of the cube at (x, y, z) = (0, -1, 0.025) m
Initial cube configuration at (x, y, z) = (1.5, 0.5, 0.025 ) m. Default desired final configuration of the cube at (x, y, z) = (1, -1, 0.025) m