Robobrawl-Juan
Project Duration: September 2019 - Present
Team: Holland Blumer, Joshua Cho, Josh Cohen, Scott Odland, Daniel Park, Paulina Robles, JD Wieland
Acknowledgements: NU Robotics Club
Introduction
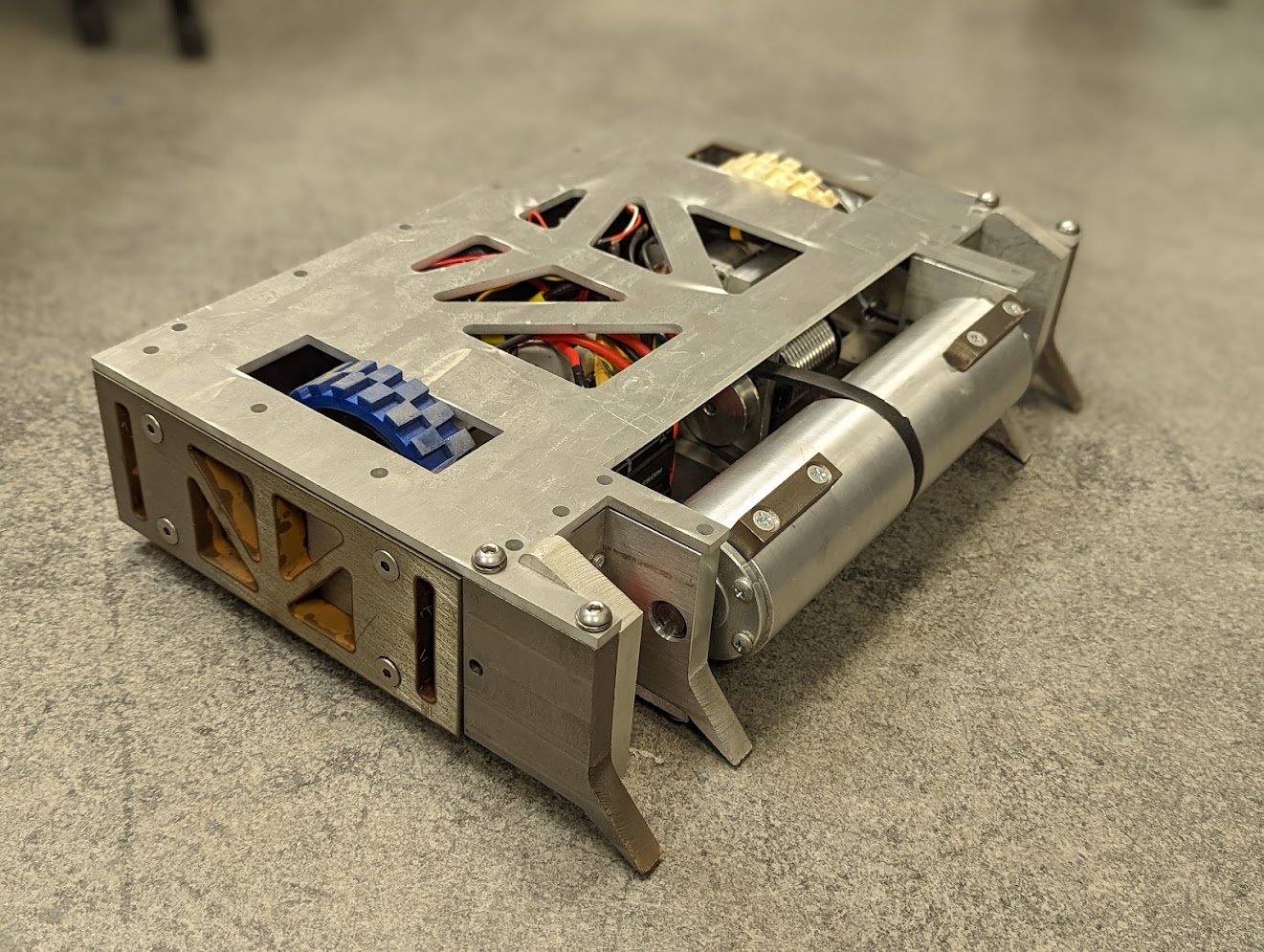
Juan is my team's entry this year for Robobrawl, an annual nationwide combat robotics event held at the University of Illinois at Urbana-Champaign every March. Juan is an invertible combat robot with a spinning drum as its weapon, and will compete in the 30 pound weight division.
Design Overview
Juan is what is commonly known as a drumbot, a name given to a combat robot that uses a long cylinder-like weapon that spins vertically at a fast speed. One biggest advantage of a drumbot is that it can potentially toss an opposing robot upward. If designed correctly, it can disable its opponent with a single hit. In addition, a drumbot can also be easily implemented into an invertible design.
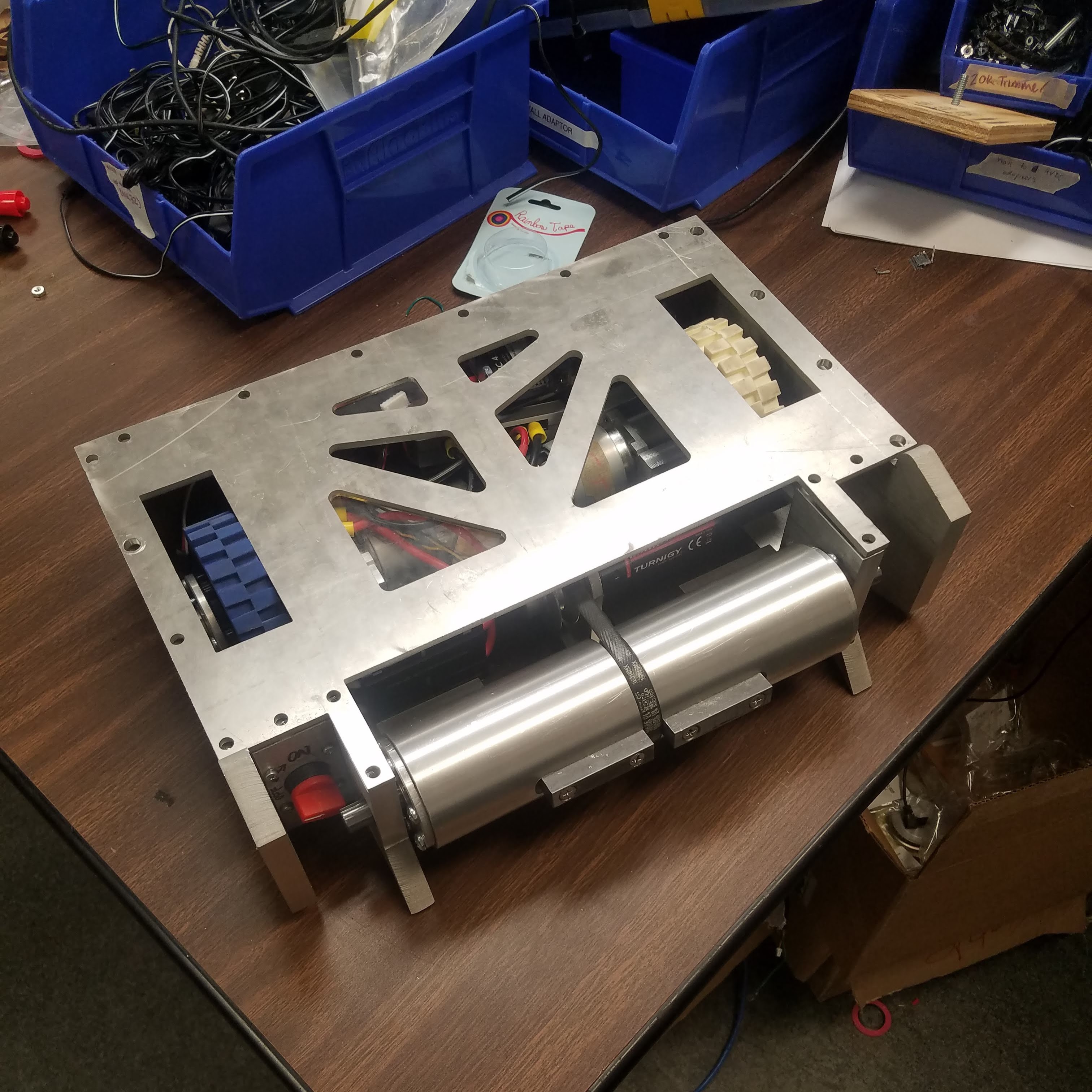
Frame Design
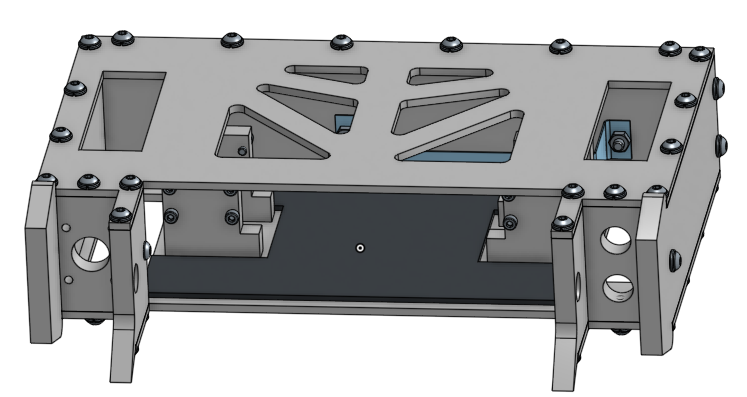
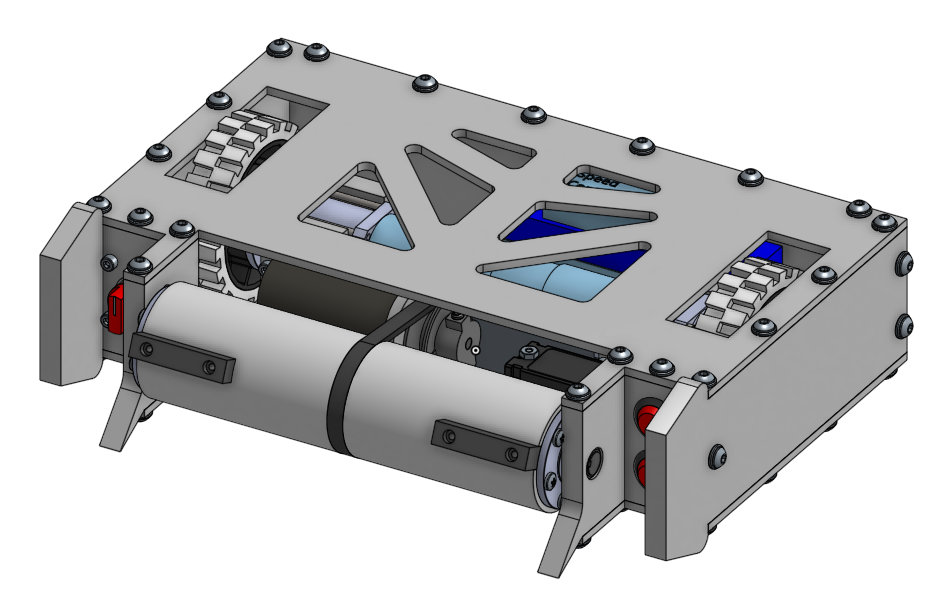
Juan's frame is desgined to be able to protect all of its internal components, including the kill switch and the indicator LEDs that are exposed, from attacks from all angles. The two front supports are protruded in both directions, allowing Juan to be invertible. We included a built-in wedge on each side of the spinning weapon to deflect impact and help our robot get underneath the opponent and deliver a more effective blow. All plates are waterjetted and milled down to size from 1/2" sheet of 6061 aluminum, with the exception of the top and bottom plates, which are 3/16" thick.
Drivetrain Design
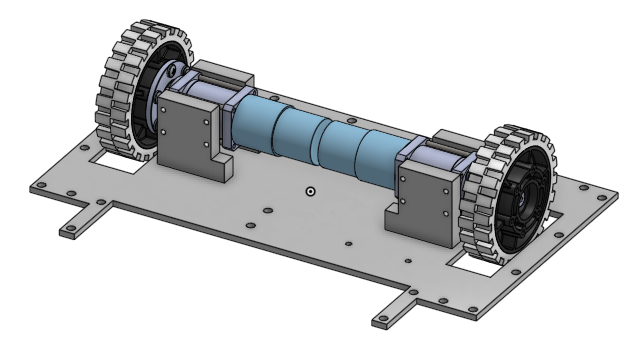
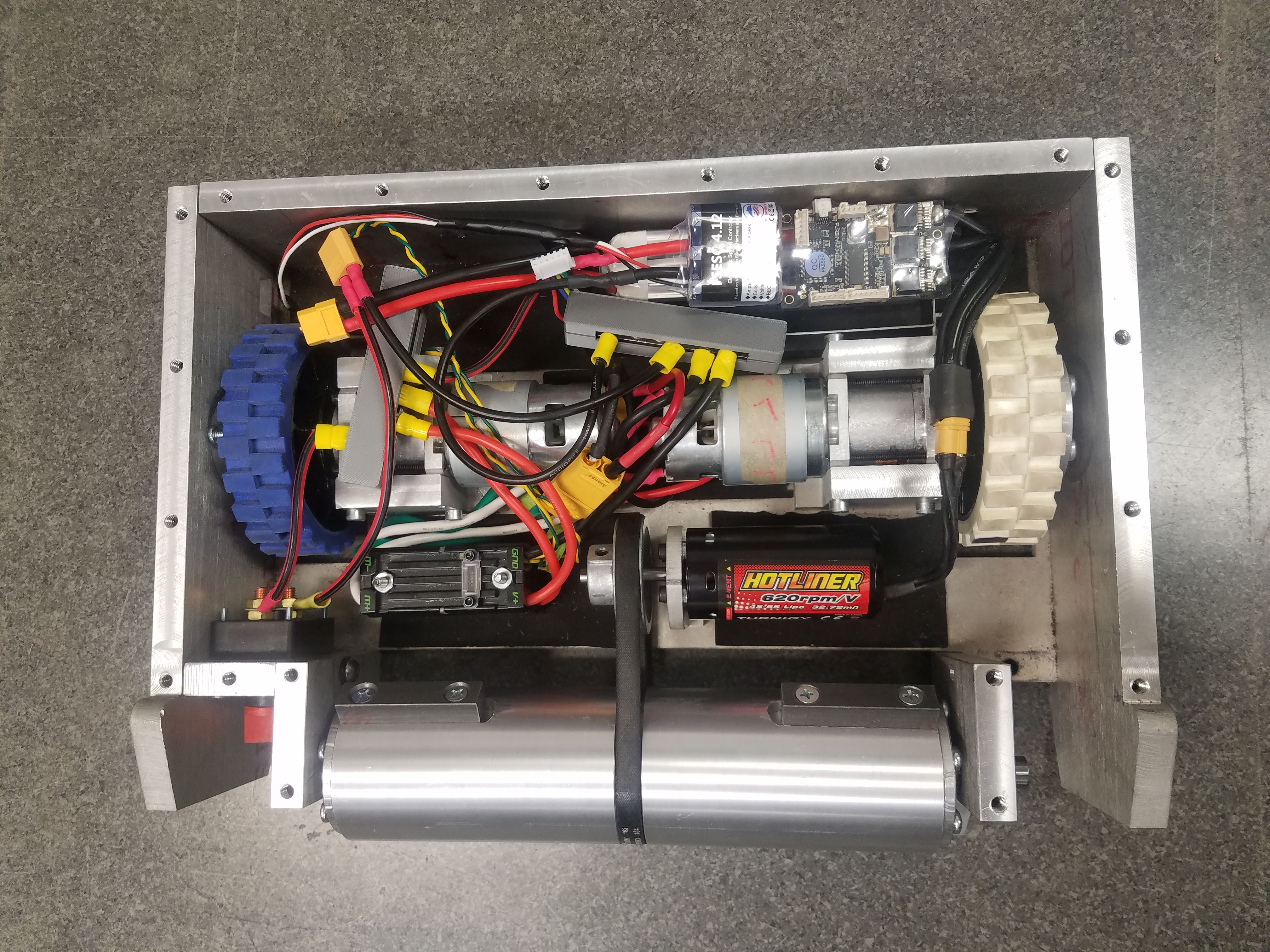
The drivetrain of Juan consists of two HiGrip Wheels driven by two Banebots RS775 motors, paired with P60-44-7 16:1 gearboxes, which are also from Banebots. Each motor is controlled by a Talon SRX from Vex, which takes PWM signals from a microcontroller. These choices are quite straightforward and have proven to be successful from previous years' competitions.
Weapon Design

The weapon consists of a hollow aluminum cylinder with four steel inserts. The weapon is v-belt pulley driven by a DT38 620kv Turnigy Hotliner Brushless Inrunner Motor. The pulley ratio is 5:4, meaning with our 18.5V battery, the drum can theoretically spin up to \(620kv\times18.5V\times \frac{4}{5}= 9176 rpm\) ignoring the mass of the pulley. The moment of inertia of the finished drum calculated from CAD was \(I= 4.96\times10^{-3}kg\:m^2\).
The total theoretical rotational energy delivered by the drum at max speed was calculated using the equation \(E=\frac{1}{2}I\omega^2 = 4.58kJ\)
Of course in real life, the actual energy delivered is lower due to lower motor speed and low efficiency.
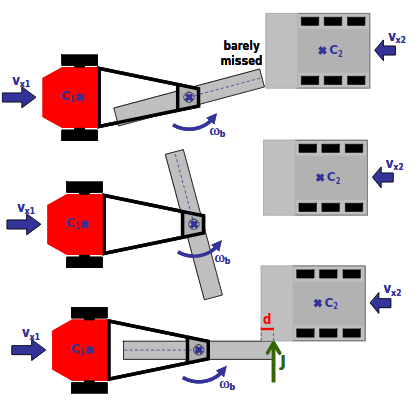
To maximize the amount of damage Juan does to the opponent per hit, we had to maximize our weapon's bite,
the distance that measures how much the tips of the spinner will get into the opponent before hitting it (d in the diagram to the right from Riobotz).
Bite was an important factor because a large bite meant that the spinner has a larger contact area with
the opponent and would deliver a more effective blow.
Therefore, the team decided to go with a design that has
four protruding inserts, with two outside inserts facing one direction and the two inside ones facing the opposite direction. This ensured that our weapon had the
maximum possible bite, while maintaining the center of mass at the axis of rotation.
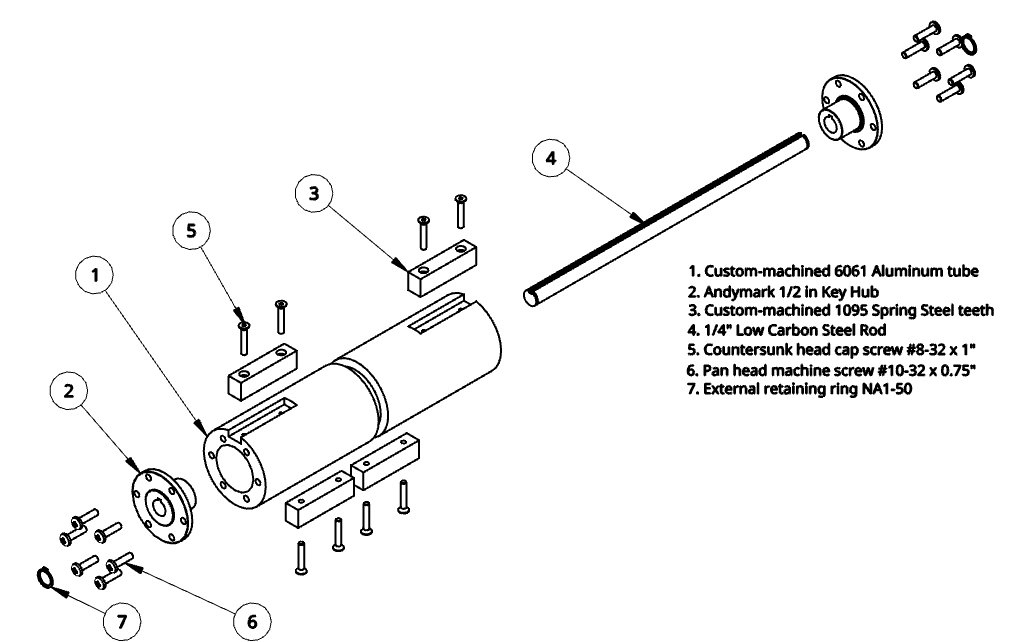
The cutouts for the v-belt and the steel inserts on the 6061 aluminum tube were machined on mill and lathe. The steel inserts were also custom machined, and were fastened onto the tube using #8-32 countersunk screws. The bolt circle pattern were machined on a conversational mill.

Electronics
Juan is powered by a single 5S 5000mAh 50C LiPo battery from HRB. All motor controllers receive PWM signals from Adafruit HUZZAH32,
a versatile ESP32-based feather board that supports Bluetooth classic and LE. This Bluetooth capability allowed the team to wirelessly control the robot
using a familiar PS4 controller instead of a RC transmitter.
Programming the board was fairly straightforward, which involved properly mapping the PS4 joystick input to
the correct PWM range of the motor and outputting it to the corresponding pin. Our Github repository can be found here. We also took advantage of the fighting robot controller library,
written by Albert Dotson of NU Robotics Club.
Electric power was distributed among components using two copper busbars, which were protected by 3D-printed enclosures.
Future Development
Unfortunately due to concerns surrounding the COVID-19 pandemic, Robobrawl, which was scheduled to be held in March 2020, was cancelled 2 weeks before the event. Although we were not able to see how well our robot performed against other robots, we conducted some internal assessments, and have identified areas to improve before next year's competition.
- Juan weighed 21 pounds, which is way below the maximum allowable weight of 30 pounds. We plan on replacing some of the aluminum plates from the frame with annealed steel to add extra weight and protection. We will also brainstorm ideas to add more weight to the drum without jeopardizing the center of mass or the bite.
- We will definitely work on better cable management. This could be done by making the chassis longer, which will add more room for us to properly mount power distrubtion modules.
- We will continue testing and playing with the VESC firmware to decrease the time it takes for the drum to spin up to its max speed. Currently it's at 3.83 seconds.
- The drive motors spin up too quickly, making it hard to control the robot. We will modify the code to make them less responsive.
Update - November 2021
Juan competed at the Norwalk Havoc Robot League in Norwalk, CT on November 13, 2021.
Here's the footage from the event: